Асинхронные электродвигатели с фазным ротором
В настоящее время, на долю асинхронных двигателей приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. К ним относятся и трехфазные асинхронные двигатели.
Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п.
Достоинства асинхронных электродвигателей
Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Устройство асинхронных электродвигателей с фазным ротором
 Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором.
Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором.
Статор трехфазного асинхронного двигателя состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов.
Фазы обмотки можно соединить по схеме ”звезда” или “треугольник” в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют “звездой”. Если же напряжение сети 220 В, то обмотки соединяют в “треугольник”. В обоих случаях фазное напряжение двигателя равно 220 В.
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.
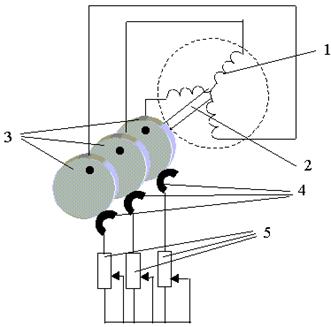
В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).
Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Принцип работы асинхронных электродвигателей
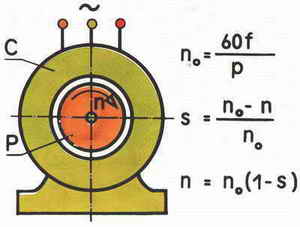
Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1
Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
Асинхронный электродвигатель с фазным ротором
Асинхронный электродвигатель – очень распространенная электрическая машина. Он прост в изготовлении и обслуживании, а из-за простоты конструкции – очень надежен. Но есть у него один недостаток – угловая скорость вращения вала неизменна и зависит от количества полюсов обмотки статора. А как быть, если в процессе работы требуется изменять частоту вращения?
Необходимость регулировки оборотов в основном требуется для электродвигателей, устанавливаемых на кранах. Выполняют они там следующие основные функции:
- перемещение крана (моста крана) по рельсам;
- перемещение тележки крана (в перпендикулярной рельсам плоскости);
- подъем груза.
Для перемещения моста крана могут использоваться два двигателя (на обоих концах моста). Для подъема груза могут использоваться два гака разной грузоподъемности, поднимаемые разными электродвигателями. Один гак может иметь два диапазона скоростей подъема, и тоже использовать для этого два электродвигателя.
Мостовой кран
Есть и другие механизмы, скоростью вращения которых нужно управлять: конвейеры, вентиляторы.
Еще одна причина изменять скорость вращения электродвигателя – необходимость его плавного разгона. В момент включения он потребляет ток, в несколько раз превышающий номинальный. Называется он пусковым током. Если при этом еще и нагрузка мотора тяжелая и тоже разгоняется с трудом, то время пуска двигателя увеличивается, а пусковые токи нагревают обмотку статора и могут ее вывести из строя. Да и вал электромотора, его подшипники испытывают механические нагрузки, сокращающие их ресурс.
Электродвигатели постоянного тока способны изменять скорость вращения вала. Для этого в цепи их обмоток включаются реостаты. Этот метод решения проблемы используется на электрифицированном транспорте: в трамваях, троллейбусах, электричках, метро. Но вся инфраструктура энергоснабжения этих потребителей организована особым образом, ведь у постоянного тока свои особенности. Использовать же постоянный ток на предприятиях, большинство потребителей которых работает от сети трехфазного переменного тока, не выгодно. Да и у самих электродвигателей постоянного тока недостатков хватает: сложный щеточный аппарат, уход за коллектором. Реостаты греются, а дистанционное управление несколькими реостатами сразу – сложно.
Поэтому в подобных механизмах используются асинхронные электродвигатели с фазным ротором.
Принцип работы асинхронного электродвигателя с фазным ротором
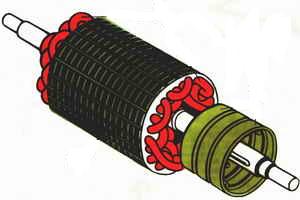
Статор этого электродвигателя ничем не отличается от обычного. А вот в его ротор добавлены обмотки трех фаз, соединенные в звезду, концы которых выведены на контактные кольца. По кольцам скользят щетки, с помощью которых обмотки подключаются к электрической цепи.
Фазный ротор
Асинхронный двигатель с короткозамкнутым ротором работает так:
- ток в обмотках статора создает вращающийся магнитный поток внутри него;
- изменяющийся во времени магнитный поток, пересекая витки обмотки ротора, наводит в них ЭДС;
- поскольку обмотка ротора замкнута, за счет наведенной ЭДС в ней возникает ток;
- проводники обмотки ротора с током взаимодействуют с вращающимся полем статора, создается вращающий момент.
Особенность асинхронного двигателя с фазным ротором: ток в роторе можно изменять, подключая последовательно с его обмотками резисторы. Чем больше сопротивление резистора, тем меньше ток в роторе. С уменьшением тока уменьшается и сила взаимодействия с вращающимся полем статора. Скорость вращения падает.
Наличие резисторов в цепи ротора увеличивает объем пускорегулирующей аппаратуры двигателя. Мощность, которая рассеивается на них, возрастает с мощностью электродвигателя. Но и для небольших моторов она существенна, что приводит к громоздким конструкциям магазинов сопротивлений и необходимости обеспечивать им постоянное охлаждение. Резисторы изготавливаются из материалов, имеющих высокое удельное сопротивление. Проводники их наматываются на каркасы или монтируются на изоляторы из фарфора. Конструкция помещается в кожух с жалюзийными отверстиями для охлаждения или закрываются сеткой.
Магазин резисторов для кранового электродвигателя с фазным ротором
Не всегда возможно разместить резисторы в помещениях. На кранах они находятся непосредственно на мосту, что приводит к массовому скоплению внутри них пыли и необходимости часто проводить техническое обслуживание.
Плавная регулировка скорости электродвигателя с фазным ротором не производится. Изменение сопротивления в цепи ротора производится фиксированными ступенями. Для этого резисторы разделяются на секции, соединенные последовательно, в цепях которых устанавливаются контакторы управления. При необходимости увеличить скорость вращения контакторы шунтируют часть резисторов, уменьшая их суммарное сопротивление. Для достижения максимальной скорости вращения шунтируются все резисторы, для минимальной – не шунтируется ничего.
Асинхронный электродвигатель с фазным ротором
А теперь рассмотрим несколько примеров построения схем управления асинхронным двигателем с фазным ротором.
Плавный запуск двигателя с фазным ротором
Система плавного разгона электродвигателя с фазным ротором работает автоматически. Оператор нажимает кнопку «Пуск», дальше автоматика все делает сама.
Главный контактор подключает к трехфазному напряжению обмотку статора. Двигатель начинает вращение с минимально возможной скоростью, так как в цепь его ротора включены резисторы с максимально возможным сопротивлением.
Через фиксированную задержку, формируемую реле времени, включается первый контактор, шунтирующий первую секцию сопротивлений в цепи ротора. Скорость вращения немного возрастает. Проходит еще время, второе реле времени запускает следующий контактор. Шунтируется следующая секция сопротивлений, ток в цепи ротора возрастает, скорость вращения – увеличивается. И так далее, до полного исключения всех сопротивлений из цепи ротора. При этом электродвигатель выходит на номинальные обороты.
Схема плавного пуска асинхронного электродвигателя с фазным ротором
Число ступеней разгона выбирается из условий тяжести запуска. Разгон получается не таким уж плавным, ток в статоре возрастает ступенями. При старте и переходе на каждую последующую ступень, электродвигатель все равно потребляет пусковой ток, хоть и меньшего значения.
Этого недостатка лишены электродвигатели, для разгона которых используются жидкостные пускатели (или стартеры). В них в качестве резистора используется жидкость с высоким удельным сопротивлением. Это – дистиллированная вода с растворенной в ней специальной солью. Уменьшение сопротивления достигается за счет уменьшения расстояния между электродами, помещенными в эту жидкость. Электроды приводятся в движение небольшим электродвигателем через червячную передачу. За счет этого уменьшение сопротивления в цепи ротора и разгон электродвигателя происходят плавно.
Регулировка скорости крановых электродвигателей
Если при плавном запуске электродвигателя с фазным ротором управление переключением сопротивлений происходит автоматически, то на кране этим управляет оператор – крановщик. Для этого в его кабине размещаются органы управления – контроллеры (на старых кранах) или джойстики (на современных). Они имеют два направления движения: «вперед-назад», «влево-вправо» или «вверх-вниз», в зависимости от назначения контроллера (управление мостом, тележкой или подъемом груза соответственно). В каждом из направлений рукоятка управления проходит ряд фиксированных положений. Чем дальше положение от рукоятки от средней точки, в которой привод выключен, тем больше скорость вращения электромотора. И тем быстрее происходит перемещение механизма или подъем (опускание) груза.
При изменении направления перемещения рукоятки управления изменяется направление вращения электродвигателя. Это происходит за счет переключения чередования фаз питания обмотки статора. Для этого две фазы меняются местами. Происходит это путем подачи напряжения на обмотку реверсивными контакторами, состоящих из двух элементов: контактора «Вперед» и контактора «Назад».
При переключении скоростей другими контакторами из цепи обмотки ротора удаляется часть резисторов. Первое положение рукоятки управления всегда включает электродвигатель с полным набором сопротивлений в цепи ротора. Крайнее положение рукоятки шунтирует все сопротивления.
Устройство, виды и принцип действия асинхронных электродвигателей
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.

История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.

Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».

Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором

Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.