5.2. Устройство асинхронного двигателя
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
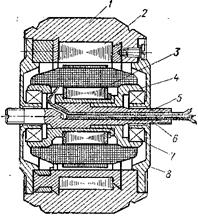
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
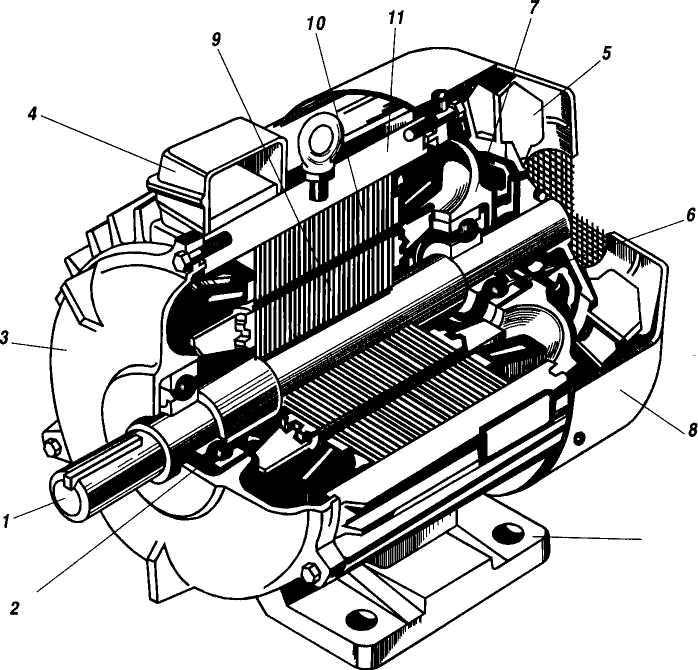
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам. Конструкция короткозамкнутого ротора приведена на рис.5.3.
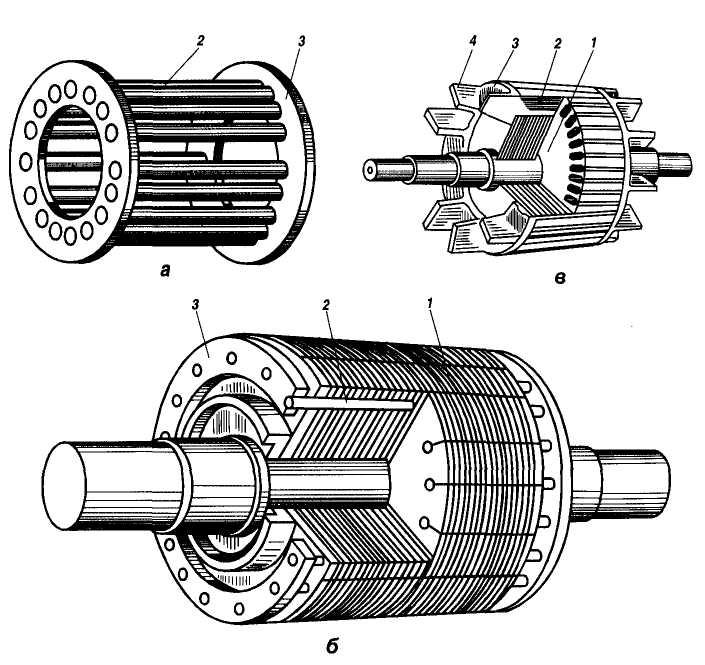
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
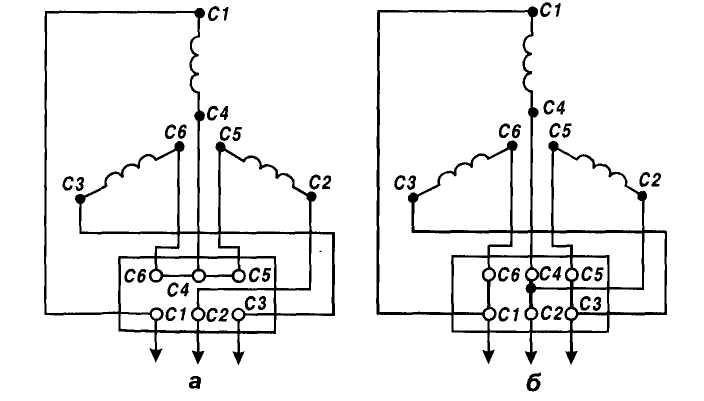
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
Принцип образования вращающегося магнитного поля рассмотрим на примере простейшей трехфазной двухполюсной обмотки, каждая фаза которой состоит из одной секции, фазы обмотки соединены звездой (рис.5.5). При этом секции тока в фазных обмотках (по времени) относительно друг друга на электрический угол 120° (рис.5.5, б). Проведем ряд построений вектора МДС трехфазной обмотки Fm, соответствующих различным моментам времениt0, t1, t2,t3отмеченным на графике рис.5.5, б.
В момент времени tток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
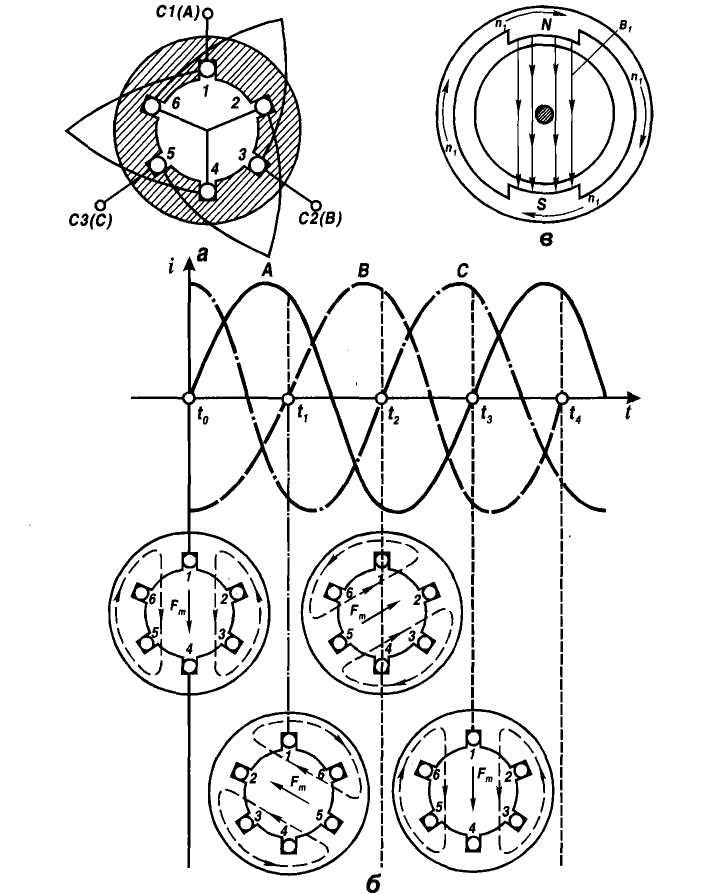
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t, заметим, что вектор МДС обмотки статора Fmпо сравнению с его положением в момент времени tповернулся на 120° в направлении движения часовой стрелки.
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с tдо t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойnкоторая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
 ,
,
Зависимость n от р и f представлена в табл.5.2.
Общие сведения, конструкция асинхронного двигателя
Основными частями любого электродвигателя переменного тока являются: неподвижная часть, называемая статором, вращающаяся часть, называемая ротором. Статор и ротор разделены воздушным зазором, величина которого колеблется от 0,1 мм до 1,5 мм в зависимости о т мощности двигателя. В статоре расположены обмотки, к которым подводится электрическая энергия переменного тока от внешнего источника. Обмотки создают в статоре магнитное поле вращающееся с частотой кратной частоте источника. Магнитное поле статора заставляет вращаться ротор двигателя. Если частота вращения ротора в установившемся номинальном режиме точно равна частоте вращения магнитного поля статора, то двигатель называется синхронным, в противном случае – асинхронным.
Асинхронные электродвигатели в настоящее время являются самыми распространенными в мире электродвигателями. На их долю приходится не менее 80% из общего числа выпускаемых промышленность электродвигателей. Это объясняется простотой конструкции, невысокой стоимостью, долговечностью и надежностью в эксплуатации.
Существуют две схемы исполнения асинхронных двигателе: прямая и обратная. В двигателях, выполненных по прямой схеме (рис. 3.1), ротор 1 жестко связан с валом двигателя и вращается вместе с ним. Статор 2 кольцом охватывает ротор и закрепляется на корпусе двигателя 3, который имеет вид трубы, выполненной из алюминия или стали. В двигателях, выполненных по обратной схеме (рис. 3.2) статор 2 жестко закрепляется на неподвижном валу двигателя, а ротор 1 вращается относительно вала на подшипниках и кольцом охватывает статор. Двигатели обратной схемы используются сравнительно редко, в основном, в качестве гиромоторов [], поэтому далее будем рассматривать только двигатели прямого исполнения.

Рис. 3.1. Конструкция трехфазного асинхронного двигателя серии АОЛ
 |
 |
 |
| а) | б) | в) |
Рис. 3.2. Конструкция гиромотора
а – закрытый несимметричный гиромотор, б – закрытый симметричный гиромотор, в – открытый симметричный гиромотор
Для уменьшения потерь на вихревые токи сердечник статора набирают из штампованных листов электротехнической стали толщиной 0,35÷0,5 мм. Листы штампуются в виде колец 1 (рис. 3.3). На внутренней стороне колец 2 имеются углубления – пазы, в которые укладываются провода обмотки статора. Листы перед сборкой изолируют, покрывая слоем лака.

Рис. 3.3. Листы стали статора и ротора
Пазы статора могут быть полузакрытыми или полуоткрытыми. В машинах переменного тока малой и средней мощности применяют полузакрытые пазы (рис. 3.4). Каждый паз изолируют 1, а затем заполняют проводниками обмотки 2. Обмотку статора закрепляют в пазах с помощью деревянных или пластиковых клиньев 3. В трехфазныз двигателях обмотка трехфазная; фазы сдвинуты в пространстве относительно друг друга на 120 эл. град.
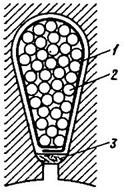
Рис. 3.4. Полузакрытый паз статора
Концы фаз выводят на зажимы коробки выводов. Трехфазную обмотку статора можно собирать в треугольник или звезду в зависимости от напряжения сети.
Ротор 1 (рис. 3.1) асинхронного двигателя обычно представляет собой набранный из штампованных листов электротехнической стали сердечник с пазами, насаженный на вал. Сердечник ротора имеет форму цилиндра, на поверхности которого имеются пазы для обмотки. Листы сердечника ротора 2 (рис. 3.3) специально не изолируют, так как в большинстве случаев вполне достаточной изоляцией оказывается пленка окалины, имеющаяся на поверхности листов.
В зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные.
В машинах малой и средней мощности чаще всего применяются короткозамкнутые роторы. В пазах таких роторов располагаются медные или алюминиевые стержни, соединяющиеся с торцов короткозамыкающими кольцами. Таким образом, обмотка короткозамкнутого ротора имеет вид беличьей клетки (рис. 3.5, а). Чаще всего корткозамкнутая обмотка получается в результате заливки пакета стали алюминием. В этом случае короткозамыкающие кольца снабжают выступами – вентиляционными лопастями, которые при вращении ротора перемешивают воздух и способствуют лучшему охлаждению машины (рис. 3.5, б).
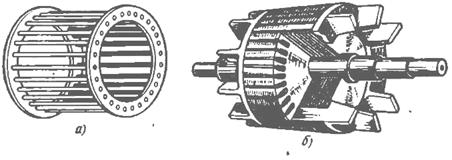
Рис. 3.5. Короткозамкнутая клетка и ротор с обмоткой из алюминия
В асинхронных машинах большой мощности и в некоторых специальных машинах малой мощности для получения большого пускового момента и широкого диапазона регулирования частоты вращения применяются фазные роторы. В пазах такого ротора укладывают не стержни, а изолированные проводники катушек (секций) трехфазной обмотки, выполненной аналогично обмотки статора и соединенной в звезду. Концы фаз обмотки ротора присоединяют к изолированным друг от друга и вала двигателя контактным кольцам, по которым при вращении ротора скользят укрепленные в щеткодержателях щетки. С помощью контактных колец и щеток обмотка ротора соединяется с пусковыми (ПР) или регулировочными реостатами (рис. 3.6).
Вал двигателя вращается в подшипниках, укрепленных в подшипниковых щитах – крышках (рис. 3.1), которые выполнены из того же материала, что и корпус машины.
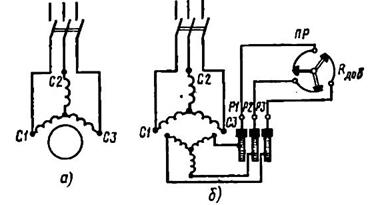
Рис. 3.6. Принципиальные схемы асинхронных двигателей
Не нашли то, что искали? Воспользуйтесь поиском:
Устройство, виды и принцип действия асинхронных электродвигателей
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.

История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.

Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».

Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором

Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
| 5. Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.
- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.